床")



電磁循跡式校園除雪機(jī)器人設(shè)計與實現(xiàn)
2017-8-8 來源: 西安市鐵一中學(xué),陜西 西安 作者: 劉家睿
摘 要:我國北方地區(qū)降雪后,學(xué)校師生通常采用人力方式進(jìn)行校園內(nèi)路面的積雪清理。基于校園需求,結(jié)合校園內(nèi)道路簡單、白天人群密集等特征,本文設(shè)計了基于電磁循跡的校園自動除雪機(jī)器人。利用該裝置除雪,一方面可以減輕師生清除積雪負(fù)擔(dān),另一方面能方便快捷地清理積雪。
關(guān)鍵詞:電磁循跡;電磁傳感器;超聲波傳感器;自動除雪
本項目所設(shè)計的機(jī)器人由電磁傳感器通過感應(yīng)鋪設(shè)在校園道路上的電磁軌道線路來進(jìn)行清雪工作,規(guī)避了外界環(huán)境對機(jī)器人行走路線的干擾,使機(jī)器人在白天、黑夜都可以進(jìn)行工作;由超聲波傳感器感知前方是否有障礙,當(dāng)判斷前方有行人距離機(jī)器人較近時停止前進(jìn),適時躲避行人,保證了校園內(nèi)學(xué)生的安全;由向右側(cè)道路傾斜和道路形成一定夾角的推雪鏟斗將道路上的積雪推到道路兩側(cè),不會對校園環(huán)境產(chǎn)生破壞。樣機(jī)實驗表明:該機(jī)器人結(jié)構(gòu)簡單、體積小巧,可以為學(xué)校的主要道路清出一條安全的人行通道,從而解決大量降雪時校園內(nèi)除雪不及時和除雪時破壞校園學(xué)習(xí)環(huán)境的問題。該設(shè)計可以廣泛推廣,方便出行。
一、前言
我國北方地區(qū)每年大概有 3-5 個月的降雪期。為了保障大多數(shù)人雪后上班、上學(xué)的出行安全,環(huán)衛(wèi)人員利用大型掃雪設(shè)備或通過撒布化學(xué)藥劑等方式清理主要道路上的積雪,而忽略諸如校園、居民小區(qū)里的狹小路面,積雪往往靠師生、居民自己清除。對于校園等的狹小路面,目前的除雪方法存在如下不足:除雪方法原始且效率低、大型除雪設(shè)備無法進(jìn)入、化學(xué)融雪劑因耗能大、成本高、易造成環(huán)節(jié)及路面污染和腐蝕而不能使用。因此研制符合校園實際的體型小巧、效率較高、成本較低、安全性高、便于操作的除雪裝置顯得尤為必要。本項目所設(shè)計的“電磁循跡式校園除雪機(jī)器人”便是借鑒大型除雪裝置機(jī)理且滿足上述要求的除雪裝置。
二、需求分析
本項目設(shè)計的校園自動除雪機(jī)器人需要滿足以下幾個功能:
(一)除雪功能
除雪機(jī)器人首要工作就是清雪掃雪,校園道路人流比較集中,下雪后必須及時清理,清理時間最好是在上課時或放學(xué)后進(jìn)行。這就要求除雪機(jī)器人要能適用于學(xué)校道路,并且能夠及時、噪聲小并以環(huán)保的方式進(jìn)行除雪工作。
(二)自動行駛功能下雪時間不固定,積雪又要及時清理,因此除雪機(jī)器人除了要滿足在指定道路上行走外,還要能夠適應(yīng)各種不同的時間段,即在天亮、天黑的情況下均能運行。所以對于自動行駛的功能要滿足任何時段、任何光線下可以按照指定路線進(jìn)行清理工作。
(三)躲避行人功能在機(jī)器人自動清理積雪過程中,難免會有行人經(jīng)過,要避免行人和除雪機(jī)器人相互影響,機(jī)器人在行駛過程中要能夠識別前方是否有行人經(jīng)過或擋路實現(xiàn)躲避行人的功能。
三、總體設(shè)計方案
針對需求分析結(jié)果,本項目以電機(jī)驅(qū)動的雙驅(qū)智能車底盤為平臺,采用Arduino單片機(jī)開發(fā)板為機(jī)器人主控制器,利用(電磁)循跡傳感器控制機(jī)器人運行路徑,距離(超聲波)傳感器判斷行人從而進(jìn)行避讓,通過推雪鏟斗的機(jī)械推雪方式進(jìn)行道路除雪工作,項目總體結(jié)構(gòu)如圖1所示。
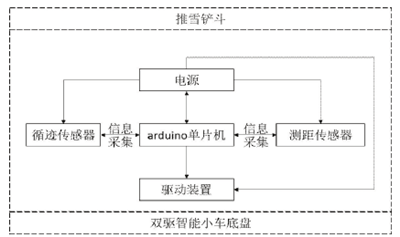
圖1 總體結(jié)構(gòu)圖
(一)循跡模塊
本項目選用電磁循跡,其原理簡述如下。路徑中央的導(dǎo)線通有正弦規(guī)律變化的電流,由畢奧——薩伐爾定律可知,變化的電場激發(fā)變化的磁場,且磁場與電場的變化規(guī)律一致。 對于通有穩(wěn)恒電流 I 長度為 L 的直導(dǎo)線,周圍會產(chǎn)生磁場,距離導(dǎo)線距離為 r 處 p 點的磁感應(yīng)強(qiáng)度為
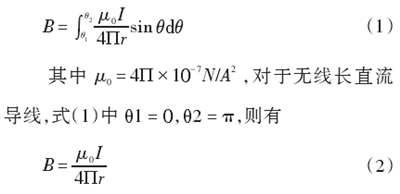
當(dāng)通電導(dǎo)線上方置有線圈繞成的電感時,正弦電流會引起通過線圈回路所圍成的磁通量Φ的變化,回路中會產(chǎn)生感應(yīng)電動勢 e,由法拉第電磁感應(yīng)定律可知,感應(yīng)電動勢大小與通過導(dǎo)線回路的磁通量變化率成正比,即

其中 k 為線圈面積,由式(4)可知當(dāng)線圈中感應(yīng)電動勢的大小正比于電流的變化率,反比于線圈中心到導(dǎo)線的距離。即電感離通電導(dǎo)線越近,感應(yīng)電動勢就越強(qiáng),反之電感離通電導(dǎo)線越遠(yuǎn),感應(yīng)電動勢就越弱。在除雪機(jī)器人中軸線前方安裝有對稱的電磁傳感器,當(dāng)機(jī)器人自動行駛過程中偏離通電導(dǎo)線,前方的電磁傳感器會產(chǎn)生感應(yīng)電動勢。在理想情況下,通電導(dǎo)線正好穿過機(jī)器人的中心軸,則兩邊電磁傳感器產(chǎn)生大小相等、方向相同的感應(yīng)電動勢,其差值為零。如果機(jī)器人在行駛過程中偏移了方向,兩邊的電磁傳感器會產(chǎn)生電動勢差值,通過 AD 轉(zhuǎn)換器將電動勢差值轉(zhuǎn)換成數(shù)字信號由單片進(jìn)行處理,從而調(diào)整其行駛方向。
(二)避障模塊
避障可以使用紅外傳感器或者超聲波傳感器,同樣是為了不受室外環(huán)境的干擾,所以本項目采用了超聲波傳感器。在檢測障礙時,超聲波傳感器發(fā)送器發(fā)出40KHz 的脈沖超聲波,如除雪機(jī)器人前方遇到
障礙物時,此超聲波信號被障礙物反射回來,由接收器接收,經(jīng)LM318兩級放大,再經(jīng)帶有鎖相環(huán)的音頻解碼芯片 LM567 解碼,當(dāng) LM567 的輸入信號大于25m V時,輸出端由高電平變?yōu)榈碗娖剑?0C51
單片機(jī)處理。
(三)除雪裝置
經(jīng)過文獻(xiàn)研究發(fā)現(xiàn),除雪方式分為:融雪除雪法、機(jī)械除雪法和綜合式除雪法。除雪機(jī)器人采用傾斜式推雪鏟斗設(shè)計鏟斗是由類似字母“C”形的加強(qiáng)鋼板構(gòu)成,并對其內(nèi)表面進(jìn)行拋光處理,使其在傾斜一定角度后具有將積雪向道路外側(cè)鏟除的作用。(四)單片機(jī)模塊單片機(jī)(Microcontrollers)是一種集成電路芯片,是采用超大規(guī)模集成電路技術(shù)把具有數(shù)據(jù)處理能力的中央處理器 CPU、隨機(jī)存器RAM、只讀存儲器 ROM、多種 I/O 口和中斷系統(tǒng)、定時器/計數(shù)器等功能集成到一塊硅片上構(gòu)成的一個小而完善的微型計算機(jī)系統(tǒng),在工業(yè)控制領(lǐng)域廣泛應(yīng)用單片機(jī)模塊是整個機(jī)器人的大腦,處理傳感器的各種信息,并作出正確的判斷。
四、機(jī)器人軟件設(shè)計
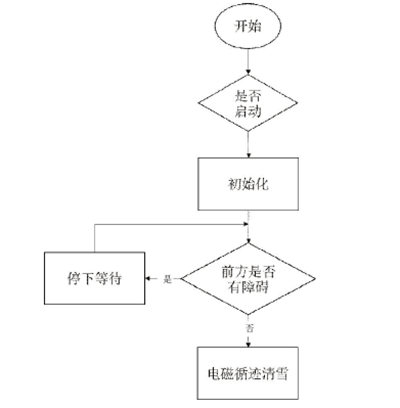
圖2 程序流程圖
機(jī)器人軟件程序主要由各硬件初始化模塊、循跡和避障處理模塊、驅(qū)動模塊組成。主程序流程圖如圖2所示。
五、電磁循跡式校園除雪機(jī)器人實現(xiàn)
(一)模型實現(xiàn)
1、機(jī)械結(jié)構(gòu)。
為了加快開發(fā)進(jìn)度和降低開發(fā)難度,本項目設(shè)計過程中采用市面上的智能小車底盤作為機(jī)器人開發(fā)平臺,最終選用了雙驅(qū)智能小車底盤。
2、硬件的選型與設(shè)計。
(1)單片機(jī)。單片機(jī)選用了 Arduino 開發(fā)板。Arduino 它沒有復(fù)雜的單片機(jī)底層代碼,沒有難懂的匯編,只是簡單而實用的函數(shù)。而且具有簡便的編程環(huán)境 IDE,極大的自由度,可拓展性能非常高。標(biāo)準(zhǔn)化的接口模式為它的可持續(xù)發(fā)展奠定了堅實的基礎(chǔ)。
(2)超聲波傳感器。超聲波傳感器選用HC-SR04 超聲波測距模塊,提供 2cm-400cm 的非接觸式距離感測功能,測距精度可達(dá)高到3mm;模塊包括超聲波發(fā)射器、接收器與控制電路。
(3)電磁循跡傳感器。電磁循跡傳感器選用了一體化四路電磁傳感器模塊,有四路模擬信號輸出,供單片機(jī)循跡使用。
(4)鏟雪裝置。本設(shè)計只是測試功能的小車模型,無法用鋼板制作“C”型鏟斗,故用半弧形塑料片加支架固定在小車前方來模擬鏟斗。
(二)程序?qū)懭?/strong>
相較于選擇硬件及組裝,自動除雪機(jī)器人程序的編寫與調(diào)試可以算作本項目的難點。通過arduino IDE開發(fā)程序分別編輯各模塊的控制代碼,并將其寫入機(jī)器人的單片機(jī)進(jìn)行調(diào)試。電磁循跡模塊控制程序。通過電磁循跡模塊返回的4路模擬信號,判斷小車所對應(yīng)電磁軌道的位置,始終保持小車中間對這電磁軌道。實現(xiàn)小車沿軌道的行使。超聲波測距模塊控制程序。判斷超聲波傳感器返回的據(jù)前方障礙物的距離,當(dāng)距離小于5cm 時,驅(qū)動電機(jī)停止工作,當(dāng)距離大于 5cm 后驅(qū)動電機(jī)重新開始工作,使機(jī)器人繼續(xù)前進(jìn)。驅(qū)動電機(jī)的控制程序。控制小車驅(qū)動電機(jī),使之完成啟動、停止、轉(zhuǎn)完的功能。
(三)實驗驗證
為驗證循跡式校園除雪機(jī)器人的除雪效果,本實驗通過設(shè)計不同的場景進(jìn)行模擬。本實驗從自動行駛、障礙物躲避和除雪效果三個方面進(jìn)行對比。自動行駛部分我們通過調(diào)節(jié)室內(nèi)燈光亮度模擬白天和黑夜,通過遮擋燈光模擬建筑物陰影。結(jié)果顯示,采用電磁循跡方式的機(jī)器人不受光線強(qiáng)弱及道路陰影的影響,能夠按照指定軌跡行駛。而采用紅外線循跡的機(jī)器人在明暗對比強(qiáng)烈的場景下,會出現(xiàn)脫離軌跡方向的情況。在障礙物躲避部分,我們通過在機(jī)器人行駛軌跡上放置障礙物來模擬經(jīng)過的行人。結(jié)果表明,采用兩種循跡方式的機(jī)器人在行駛過程中遇到障礙物市都會停止行駛,在障礙物移除(行人走開)之后會繼續(xù)沿指定軌跡行駛。最后一部分是除雪效果的檢測。我們通過在地上鋪灑面粉模擬道路積雪。結(jié)果顯示,機(jī)器人鏟雪裝置基本可以將路面的“積雪”清推到道路兩側(cè),為行人清理出可以行走的道路。除雪效果明顯。
(四)實驗總結(jié)
根據(jù)對不同場景的模擬實驗,可以看出:裝有電磁循跡的機(jī)器人比用紅外線循跡模塊的機(jī)器人更能夠適應(yīng)多種光線條件下的正常行駛,可全天工作;安裝超聲波模塊可以達(dá)到躲避行人的目的;鏟雪裝置可以完成基本的鏟雪任務(wù)。
六、創(chuàng)新性
本電磁循跡式校園除雪機(jī)器人有著如下創(chuàng)新之處:第一,采用電磁尋跡,規(guī)避了外界環(huán)境對機(jī)器人行走路線的干擾,使機(jī)器人在白天、黑夜都可以進(jìn)行工作。第二,采用超聲波進(jìn)行躲避行人,保證了校
園內(nèi)學(xué)生的安全。第三,采用了機(jī)械除雪,不會對校園環(huán)境產(chǎn)生破壞。
七、結(jié)論
本電磁循跡式校園除雪機(jī)器人,不僅具有結(jié)構(gòu)簡單、體積小巧、操作簡單、效率較高、成本較低等特點,為了能自動除雪采用了電磁循跡,并且加入了避障功能,保護(hù)了學(xué)生的安全,因此還具備安全穩(wěn)定的特點。樣機(jī)實驗表明,該機(jī)器人可以在校園中自動清出人行通道。該設(shè)計主要適用于校園,也可應(yīng)用在公園空地、工廠空地、社區(qū)、廣場空地等場合,使清雪除雪更加高效,方便人們?nèi)粘3鲂小?/font>
投稿箱:
如果您有機(jī)床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進(jìn)行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機(jī)床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進(jìn)行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
更多相關(guān)信息

業(yè)界視點
| 更多
查")
行業(yè)數(shù)據(jù)
| 更多
- 2025年6月 新能源汽車銷量情況
- 2025年6月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2025年6月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2025年6月 軸承出口情況
- 2025年6月 分地區(qū)金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2025年6月 金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2025年5月 新能源汽車銷量情況
- 2025年5月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2025年5月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2025年5月 軸承出口情況
- 2025年5月 分地區(qū)金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2025年5月 金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2025年4月 新能源汽車銷量情況
博文選萃
| 更多
- 機(jī)械加工過程圖示
- 判斷一臺加工中心精度的幾種辦法
- 中走絲線切割機(jī)床的發(fā)展趨勢
- 國產(chǎn)數(shù)控系統(tǒng)和數(shù)控機(jī)床何去何從?
- 中國的技術(shù)工人都去哪里了?
- 機(jī)械老板做了十多年,為何還是小作坊?
- 機(jī)械行業(yè)最新自殺性營銷,害人害己!不倒閉才
- 制造業(yè)大逃亡
- 智能時代,少談點智造,多談點制造
- 現(xiàn)實面前,國人沉默。制造業(yè)的騰飛,要從機(jī)床
- 一文搞懂?dāng)?shù)控車床加工刀具補(bǔ)償功能
- 車床鉆孔攻螺紋加工方法及工裝設(shè)計
- 傳統(tǒng)鉆削與螺旋銑孔加工工藝的區(qū)別