機(jī)床")



基于搬運(yùn)機(jī)器人的模具輸送系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)
2017-7-24 來(lái)源: 北京機(jī)械工業(yè)自動(dòng)化研究所 作者: 鄭洪強(qiáng),王海濤,員俊峰,宋 鑫
摘要:本機(jī)器人輸送系統(tǒng)可完成對(duì)高溫絕緣端子模具與工件的自動(dòng)化輸送與定位,設(shè)計(jì)安裝一套機(jī)器人快換手爪裝置,實(shí)現(xiàn)對(duì)不同工件和模具的抓取任務(wù)。能減少人工勞動(dòng)強(qiáng)度,保障工人安全并提高生產(chǎn)效率。
關(guān)鍵詞:輸送鏈;快換手爪;機(jī)器人;控制系統(tǒng)
0.引言
高溫模具輸送系統(tǒng)是我所依據(jù)某企業(yè)客戶高壓絕緣端子生產(chǎn)和輸送的需求,針對(duì)高溫模具與高溫工件研發(fā)設(shè)計(jì)的一套機(jī)器人搬運(yùn)與定位系統(tǒng).系統(tǒng)由兩條輸送鏈,一臺(tái)搬運(yùn)機(jī)器人,兩套快換手爪,一套掃碼裝置及周邊安全防護(hù)系統(tǒng)組成。采用掃碼識(shí)別不同模具,變頻器和伺服電機(jī)組合定位。系統(tǒng)操作方便、定位準(zhǔn)確、便于線體擴(kuò)展和增加模具種類。從技術(shù)和工藝上完成了高溫模具和工件的運(yùn)輸要求。
1.系統(tǒng)構(gòu)成
該系統(tǒng)將變頻輸送、伺服定位與機(jī)器人搬運(yùn)相結(jié)合,將高溫模具與工件按照生產(chǎn)要求進(jìn)行定向混合輸送。模具輸送如圖1所示。

圖1 模具位置
系統(tǒng)由進(jìn)料輸送鏈、出料輸送鏈、機(jī)器人搬運(yùn)系統(tǒng)和周邊防護(hù)組成。進(jìn)料鏈用于向分模工位輸送含工件的模具,進(jìn)料口設(shè)置條形碼讀寫(xiě)系統(tǒng),讀取模具信息以保證不同大小的模具可隨機(jī)輸送。模具抓取位置加定位氣缸配合機(jī)器人定位抓取。
搬運(yùn)機(jī)器人由機(jī)器人本體、手爪快換裝置和兩套手爪組成。根據(jù)抓取工件或模具的不同信號(hào),機(jī)器人快換裝置更換不同的手爪進(jìn)行抓取。模具手爪采用定位氣缸抓取,工件手爪采用伺服電機(jī)對(duì)工件進(jìn)行高度定位,通過(guò)快換裝置保證兩手爪信號(hào)的準(zhǔn)確和穩(wěn)定。本裝置減少了機(jī)器人使用數(shù)量,解決了一臺(tái)機(jī)器人無(wú)法抓取異類產(chǎn)品的難題,降低了工業(yè)投入成本,從技術(shù)上保證了搬運(yùn)的質(zhì)量和效率。
出料輸送鏈采用工件和模具交替輸送,機(jī)器人自動(dòng)識(shí)別放置工位分別放置高溫工件或模具。同時(shí),系統(tǒng)在出料口設(shè)置安全聯(lián)鎖,用于保證系統(tǒng)的安全運(yùn)行,系統(tǒng)布置圖如圖2所示。

圖2 系統(tǒng)布置圖
2.控制流程
本系統(tǒng)采用西門子315-2DP的PLC控制器和9寸觸摸屏,加配對(duì)應(yīng)的輸入輸出模塊進(jìn)行信號(hào)的采集和控制,在PROFIBUS總線連接遠(yuǎn)程分站與脈沖輸出模塊,控制伺服電機(jī)行走位置。同時(shí)通過(guò)DP總線與機(jī)器人進(jìn)行數(shù)據(jù)交互與信號(hào)聯(lián)鎖。進(jìn)出料輸送鏈采用變頻電機(jī)加齒輪控制,變頻電機(jī)加配編碼器對(duì)西門子MM440變頻器進(jìn)行位置信息反饋。從而精確對(duì)輸送鏈進(jìn)行啟停控制,同時(shí)加配定位氣缸完成準(zhǔn)確定位。系統(tǒng)I/O原理圖如圖3所示。
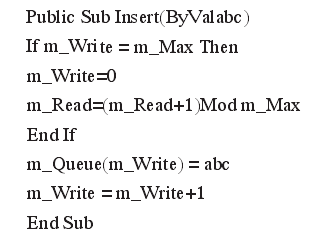
在進(jìn)料口放置模具,通過(guò)掃碼槍掃描對(duì)應(yīng)模具的條形碼,系統(tǒng)通過(guò)以太網(wǎng)將模具信息傳遞到PLC控制器內(nèi)部,信息讀取成功后,進(jìn)料鏈自動(dòng)前行一個(gè)工位,進(jìn)料口工位可繼續(xù)進(jìn)行上件掃碼流程。所有進(jìn)料鏈模具建立隊(duì)列,先進(jìn)先出,同時(shí)在觸摸屏設(shè)置隊(duì)列模具信息更改端口,通過(guò)調(diào)用模具位置號(hào)可更改對(duì)應(yīng)工位的模具信息。部分隊(duì)列寫(xiě)入程序如下:
當(dāng)模具輸送到進(jìn)料鏈機(jī)器人抓取位后,進(jìn)料鏈抓取位傳感器檢測(cè)到模具,定位氣缸伸出配合進(jìn)料鏈電機(jī)完成模具定位。同時(shí),電機(jī)編碼器將位置信息反饋給變頻器,通過(guò)變頻閉環(huán)控制實(shí)現(xiàn)精準(zhǔn)的模具定位。此時(shí),進(jìn)料口模具進(jìn)入等待狀態(tài),待機(jī)器人抓取完成后進(jìn)料鏈自動(dòng)移動(dòng)。
當(dāng)模具定位完成后,通知機(jī)器人開(kāi)始抓取動(dòng)作。機(jī)器人自動(dòng)更換模具手爪,對(duì)模具采用氣缸固定的方式行抓取。對(duì)于不同類型的模具,每個(gè)模具的尺寸和外形都可能不同,因此需要機(jī)器人調(diào)用不同的抓取程序進(jìn)行抓取任務(wù),抓取動(dòng)作開(kāi)始前,PLC將條形碼信息轉(zhuǎn)換成對(duì)應(yīng)模具信息交互給機(jī)器人,機(jī)器人調(diào)用不同的抓取程序?qū)⒛>咦ブ练帜9の弧?/font>
模具和工件在分模工位分離完成后,首先請(qǐng)求機(jī)器人抓取工件至下料鏈,機(jī)器人通過(guò)手爪快換裝置自動(dòng)更換工件手爪,工件手爪采用伺服電機(jī)進(jìn)行位置控制,對(duì)應(yīng)不同工件直徑調(diào)用不同的位置信息,伺服電機(jī)驅(qū)動(dòng)手爪伸出收回實(shí)現(xiàn)抓緊與放開(kāi)工件。機(jī)器人調(diào)用不同的抓取程序完成對(duì)不同類型工件的抓取任務(wù)。機(jī)器人動(dòng)作同時(shí)與PLC進(jìn)行信號(hào)交互,控制出料鏈識(shí)別工件放置位與模具放置位。通過(guò)變頻電機(jī)驅(qū)動(dòng)出料鏈行走至工件放置位,機(jī)器人接收到出料鏈允許放置的信號(hào)后將工件放至下料鏈,程序任務(wù)完成后向PLC發(fā)出下料鏈移動(dòng)信號(hào)將工件運(yùn)輸至下料口。工件手爪放置工件如圖4所示。
3.安全預(yù)警及故障處理
本高溫模具工件輸送系統(tǒng)具有完善的安全預(yù)警機(jī)制與故障處理方案。因?yàn)槟>咧亓看蟆囟雀撸虼嗽谙到y(tǒng)使用過(guò)程中必須保證工人的作業(yè)安全,當(dāng)系統(tǒng)出現(xiàn)故障后,在人機(jī)交互界面能及時(shí)顯示并處理故障。進(jìn)料

圖3 系統(tǒng)IO原理圖
采用有限元分析方法對(duì)結(jié)構(gòu)應(yīng)力及變形位移進(jìn)行分析,從計(jì)算結(jié)果中發(fā)現(xiàn)杠桿與試樣直接接觸存在的問(wèn)題,并通過(guò)應(yīng)變片測(cè)試對(duì)比驗(yàn)證了計(jì)算結(jié)果的準(zhǔn)確性。本文針對(duì)杠桿加載得到的主要結(jié)論有:加載杠桿直接作用于試樣的連接形式最為簡(jiǎn)便,但杠桿加載時(shí)的微小轉(zhuǎn)角會(huì)導(dǎo)致承力支點(diǎn)偏移,該承力支點(diǎn)偏移導(dǎo)致兩個(gè)結(jié)果,一方面試樣上應(yīng)力分布不對(duì)稱,應(yīng)力集中在試樣一側(cè),另一方面杠桿加載比例發(fā)生變化,載荷放大倍數(shù)降低。
球形鉸連接能夠保證杠桿在施加載荷過(guò)程中,承力支點(diǎn)位置保持不變,使得杠桿放大倍數(shù)保持恒定,有限元分析計(jì)算結(jié)果顯示,該連接方式能夠滿足本文提出的設(shè)計(jì)要求。
本文研究揭示了杠桿加載連接設(shè)計(jì)中容易存在的問(wèn)題,并給出了解決辦法,為杠桿加載的深入研究提供參考及數(shù)據(jù)理論支持。
投稿箱:
如果您有機(jī)床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進(jìn)行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機(jī)床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進(jìn)行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
更多相關(guān)信息

業(yè)界視點(diǎn)
| 更多
查")
行業(yè)數(shù)據(jù)
| 更多
- 2025年6月 新能源汽車銷量情況
- 2025年6月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2025年6月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2025年6月 軸承出口情況
- 2025年6月 分地區(qū)金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2025年6月 金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2025年5月 新能源汽車銷量情況
- 2025年5月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2025年5月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2025年5月 軸承出口情況
- 2025年5月 分地區(qū)金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2025年5月 金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2025年4月 新能源汽車銷量情況
博文選萃
| 更多
- 機(jī)械加工過(guò)程圖示
- 判斷一臺(tái)加工中心精度的幾種辦法
- 中走絲線切割機(jī)床的發(fā)展趨勢(shì)
- 國(guó)產(chǎn)數(shù)控系統(tǒng)和數(shù)控機(jī)床何去何從?
- 中國(guó)的技術(shù)工人都去哪里了?
- 機(jī)械老板做了十多年,為何還是小作坊?
- 機(jī)械行業(yè)最新自殺性營(yíng)銷,害人害己!不倒閉才
- 制造業(yè)大逃亡
- 智能時(shí)代,少談點(diǎn)智造,多談點(diǎn)制造
- 現(xiàn)實(shí)面前,國(guó)人沉默。制造業(yè)的騰飛,要從機(jī)床
- 一文搞懂?dāng)?shù)控車床加工刀具補(bǔ)償功能
- 車床鉆孔攻螺紋加工方法及工裝設(shè)計(jì)
- 傳統(tǒng)鉆削與螺旋銑孔加工工藝的區(qū)別