控")



您現(xiàn)在的位置:數(shù)控系統(tǒng)網(wǎng)>
技術(shù)前沿>五軸聯(lián)動 BC 型木工雕刻機(jī)床結(jié)構(gòu)與數(shù)控系統(tǒng)設(shè)計
五軸聯(lián)動 BC 型木工雕刻機(jī)床結(jié)構(gòu)與數(shù)控系統(tǒng)設(shè)計
2018-8-10 來源:華東理工大學(xué)機(jī)械與動力工程學(xué)院 作者:林礪宗,顧浩煒,韓帥
摘要: 針對現(xiàn)階段木工雕刻機(jī)床結(jié)構(gòu)單一的問題,設(shè)計一種經(jīng)濟(jì)型五軸聯(lián)動 BC 型木工雕刻機(jī)床及其數(shù)控系統(tǒng)。通過建立機(jī)床的運動學(xué)模型,研究五軸 BC 型機(jī)床的正逆解; 根據(jù)運動學(xué)求解的結(jié)果,采用 NC 系統(tǒng)嵌入 PC 機(jī)的開放式數(shù)控系統(tǒng)模式,設(shè)計了數(shù)控系統(tǒng)的硬件。采用 Visual C++6. 0 對數(shù)控系統(tǒng)軟件進(jìn)行編制,運用線程對運動控制進(jìn)行監(jiān)管,并對刀軌文件進(jìn)行仿真加工。通過對維納斯石蠟?zāi)P偷募庸づc測量,驗證數(shù)控系統(tǒng)加工精度符合加工要求。
關(guān)鍵詞: 五軸加工; 木工雕刻機(jī); 開放式數(shù)控系統(tǒng); 運動控制器
隨著當(dāng)今木工行業(yè)朝著自動化、集成化和智能化方向的發(fā)展,傳統(tǒng)手工雕刻逐漸被數(shù)控雕刻機(jī)床所代替。而現(xiàn)階段低端數(shù)控雕刻機(jī)呈現(xiàn)結(jié)構(gòu)單一、加工雕刻種類有限的弊端; 高端數(shù)控雕刻機(jī)成本過高。所以,研究一種經(jīng)濟(jì)、高效又符合木工雕刻行業(yè)特點的數(shù)控雕刻機(jī)床,順應(yīng)市場的需求。文獻(xiàn)[2]中研究了一種五軸龍門 AC 式木工雕刻機(jī),并對關(guān)鍵部件與剛度進(jìn)行了設(shè)計分析; 文獻(xiàn)[3]中對五軸平面雕刻軌跡規(guī)劃進(jìn)行了研究; 文獻(xiàn)[4]中提出了基于工業(yè)以太網(wǎng)結(jié)構(gòu)的木工雕刻機(jī)數(shù)控系統(tǒng)的開發(fā)思想。而 BC 型五軸雕刻機(jī)國內(nèi)外可查閱的資料較少。文中所研究的經(jīng)濟(jì)型五軸聯(lián)動 BC 型木工雕刻機(jī)床,采用懸臂梁式-擺動-旋轉(zhuǎn)的結(jié)構(gòu),可加工橫向大幅面木工工件,雕刻范圍跨度大、加工效率高、精度高; 能應(yīng)用于復(fù)雜大幅面類木工雕花以及復(fù)雜回轉(zhuǎn)類工藝品的加工; NC 系統(tǒng)嵌入 PC 機(jī)的開放式數(shù)控模式,具有低成本、高控制性能的優(yōu)點.
1、 機(jī)械結(jié)構(gòu)總體設(shè)計
1. 1 主要參數(shù)
五軸聯(lián)動 BC 型木工雕刻機(jī)床既可運用于大幅面類木工雕花、工藝扇面的加工,也能對復(fù)雜回轉(zhuǎn)工藝品進(jìn)行雕刻。根據(jù)機(jī)床所要雕刻大幅面類工藝品橫向最大尺寸、回轉(zhuǎn)類工藝品最大高度以及經(jīng)濟(jì)性等要求,設(shè)計機(jī)床主要參數(shù)如表 1所示。
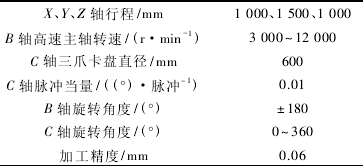
表 1 BC 型木工雕刻機(jī)床主要參數(shù)
1. 2 機(jī)械結(jié)構(gòu)總體設(shè)計
根據(jù)該機(jī)床雕刻工件的種類,合理采用了 BC 型運動軸配置方案,與傳統(tǒng) AC 型五軸雕刻機(jī)相比,該結(jié)構(gòu)下機(jī)床有效工作空間大,加工行程長,既能對回裝類工藝品進(jìn)行加工,同時又能滿足大幅面雕花作品雕刻。機(jī)床的主體機(jī)械結(jié)構(gòu)由 X 軸移動立柱、Y 軸底座、Z 軸垂直移動臂、B 軸高速旋轉(zhuǎn)主軸、C 軸數(shù)控轉(zhuǎn)臺及軸間移動導(dǎo)軌和滾珠絲杠等部件組成。具體結(jié)構(gòu)如圖 1 所示,實物如圖 2 所示。
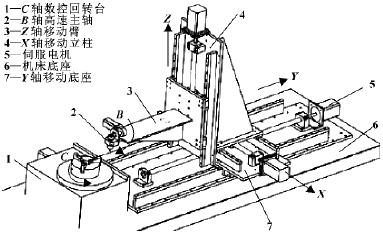
圖 1 機(jī)床機(jī)械結(jié)構(gòu)示意圖

圖 2 五軸 BC 型雕刻機(jī)床實物圖
1. 3 運動學(xué)建模分析
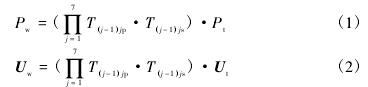
根據(jù)坐標(biāo)變換的基本原理,建立了機(jī)床坐標(biāo)系、工件坐標(biāo)系和刀具坐標(biāo)系之間的空間幾何關(guān)系。基于五軸機(jī)床的通用模型,將刀具坐標(biāo)系下的刀位點坐標(biāo)命名為 Pt(齊次坐標(biāo)為 (0,0,0,1)T),將刀軸姿態(tài)矢量標(biāo)記為 Ut(齊次坐標(biāo)為 (0,0,1,0)T)。通過齊次坐標(biāo)變換矩陣來表示機(jī)床各軸的運動,變換結(jié)果使刀具坐標(biāo)系下的刀位點與工件坐標(biāo)系下的刀位點坐標(biāo)重合; 刀具坐標(biāo)系下刀軸姿態(tài)矢量與工件坐標(biāo)系下的刀軸姿態(tài)矢量重合。由此建立等式:
建立如圖 3所示運動學(xué)模型拓?fù)浣Y(jié)構(gòu)圖.
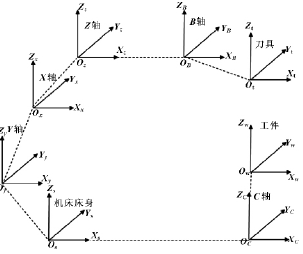
圖 3 運動學(xué)模型拓?fù)浣Y(jié)構(gòu)
根據(jù)五軸 BC 型機(jī)床運動模式、各軸之間的拓?fù)浣Y(jié)構(gòu)和各軸運動行程參數(shù),經(jīng)過 UG/NX 定制此機(jī)床的后處理文件,產(chǎn)生用于數(shù)控加工的 G 代碼介質(zhì)。通常 UG 后處理構(gòu)造器產(chǎn)生的 G 代碼為各刀位點運動軌跡的坐標(biāo)值,即刀具刀尖點在工件坐標(biāo)系下各點運動的坐標(biāo)值。在數(shù)控系統(tǒng)加載 G 代碼執(zhí)行加工前,須完成機(jī)床運動學(xué)逆解,即將 G 代碼解析成各運動軸在機(jī)床坐標(biāo)系下的運動距離和轉(zhuǎn)動角度。根據(jù)機(jī)床各軸坐標(biāo)系的拓?fù)潢P(guān)系,列出的各軸齊次變換矩陣如表 2所示.
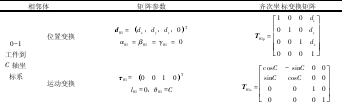
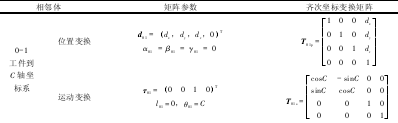
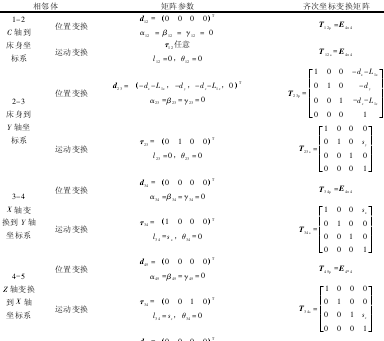

表 2 五軸 BC 型雕刻機(jī)床齊次坐標(biāo)變換矩陣
表 2中:Ts表示運動變換,Tp表示位置變換。將 X、Y、Z 3 個移動軸沿各自坐標(biāo)系的位移量記為sx、sy、sz; B 為 B 軸在 Z 軸坐標(biāo)系下 Y 軸轉(zhuǎn)動的角度; C 為 C 軸繞機(jī)床坐標(biāo)系 Y 軸旋轉(zhuǎn)的角度。表 2中齊次坐標(biāo)矩陣代入公式 (1)、 (2)化簡可得如下等式 (3—4):

2、 機(jī)床數(shù)控系統(tǒng)硬件設(shè)計
2. 1 NC 嵌入 PC 數(shù)控結(jié)構(gòu)
采用 NC 嵌入 PC 的控制體系優(yōu)點: (1) 系統(tǒng)開發(fā)成本低; (2) 工控機(jī)硬件技術(shù)發(fā)展成熟,可靠性高; (3) 該模式下數(shù)控系統(tǒng)開放性好,兼容多種軟件平臺,有利于軟件的二次開發(fā); (4) 軟件學(xué)習(xí)資料齊全,第三方資源豐富; (5) PC 機(jī)具有良好的通信功能[5]。一體式運動控制器是構(gòu)成 NC 嵌入 PC 結(jié)構(gòu)開放式數(shù)控系統(tǒng)的核心部件之一。此數(shù)控系統(tǒng)采用固高GUC-800 系列運動控制器,其整體線路規(guī)劃如圖 4所示。
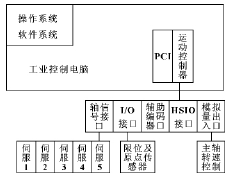
圖 4 運動控制卡整體線路規(guī)劃圖
2. 2 伺服電機(jī)參數(shù)設(shè)定
作為工業(yè)自動化不可或缺的重要部分,交流伺服系統(tǒng)能夠為負(fù)載提供最高水平的動態(tài)響應(yīng)和扭矩密度。此五軸 BC 型數(shù)控雕刻機(jī)床也采用伺服電機(jī)驅(qū)動各軸運動,整個系統(tǒng)采用半閉環(huán)控制模式,通過編碼器將伺服電機(jī)的實時位置反饋給伺服電機(jī)驅(qū)動器.Y 軸通過布置于機(jī)床床身的導(dǎo)軌絲杠相對機(jī)床做水平運動; X 軸置于 Y 軸導(dǎo)軌之上,沿水平方向移動; Z 軸電機(jī)為帶制動器的伺服電機(jī),在電機(jī)斷開伺服使能或機(jī)床出現(xiàn)故障時,能防止 Z 軸由 于自重下滑。該機(jī)床采用滾珠絲杠機(jī)構(gòu)來傳動,所以驅(qū)動器電子齒輪比 Pn202 和 Pn203 參數(shù)設(shè)定如表 3 所示。將伺服電機(jī)脈沖當(dāng)量設(shè)置為 0. 001 mm/脈沖,B、C 兩軸的脈沖當(dāng)量設(shè)定為 0. 01 (°) /脈沖。
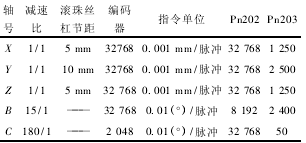
表 3 各軸伺服電機(jī) ( 安川伺服電機(jī)) 電子齒輪設(shè)置
3、 五 軸聯(lián)動 BC 型木工雕刻機(jī)床數(shù)控系統(tǒng)軟件設(shè)計
3. 1 數(shù)控軟件整體功能分析
數(shù)控系統(tǒng)軟件人機(jī)互動界面是操作者與控制機(jī)床之間的窗口,此數(shù)控軟件具有一系列人機(jī)交互基本操作,如機(jī)床點動操作按鈕、啟停急停按鈕、加工代碼分析與顯示框、調(diào)試功能區(qū)等,并加入 G代碼仿真功能,能仿真刀具加工刀軌路徑,及時發(fā)現(xiàn)異常加工。具體功能模塊如圖 5 所示。
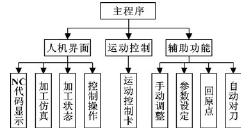
圖 5 軟件功能模塊圖

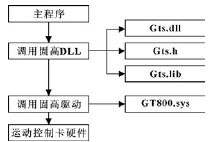
圖 6 軟件與運動控制卡通信
3. 2 基于 VC6. 0 運動線程管控
在應(yīng)用運動控制器來規(guī)劃各軸運動時,此系統(tǒng)采用位置-時間模式,該模式下能實現(xiàn)任意速度規(guī)劃,將實際運動分割成固定段數(shù),有利于數(shù)控機(jī)床運動的連續(xù)性,并減輕運動控制卡與主機(jī)的通信壓力。為實現(xiàn)對運動控制器的狀態(tài)、各軸加工運動位置、各軸加工速度以及運動控制器內(nèi)存中運動指令條數(shù)的監(jiān)控,采用運動線程管控。通過為運動控制開辟單獨線程,解決了控制器指令填充時間過長的問題。開辟獨立線程步驟如下:
(1) 開辟一個線程函數(shù),為線程定義一個句柄,具體代碼如下:
void Thread Func1(); / / 線程 1 子函數(shù)
HANDLE h Thread1; / / 用于線程
DWORD Thread ID1;// 用于線程
(2) 編輯線程函數(shù),確定線程的優(yōu)先級別并開啟線程。線程函數(shù)及其線程開機(jī)代碼如下:
h Thread1 = Create Thread ( NULL,0,( LPTHREAD _START_ROUTINE)Thread Func1,
NULL,0,&Thread ID1); / / 開啟線程
1Set Thread Priority( h Thread1,THREAD _ PRIORITY _TIME_CRITICAL); // 設(shè)定線程的優(yōu)先級別。
線程的優(yōu)先級可以分為 6 個等級,優(yōu)先級別越高,線程相應(yīng)速度就越快,可以調(diào)用 Get Thread Priori-ty ( h Thread1)
來獲得線程的優(yōu)先級,其級別由高到低依次為:
THREAD_PRIORITY_TIME_CRITICAL = 15;
THREAD_PRIORITY_HIGHEST = 2;
THREAD_PRIORITY_ABOVE_NORMAL = 1;
THREAD_PRIORITY_BELOW_NORMAL = -1;
THREAD_PRIORITY_LOWEST = -2;
THREAD_PRIORITY_IDLE = -15;
線程開啟后一直掃描直到有運動需要處理。
3. 3 數(shù)控加工代碼仿真
NI Measurement Studio 是 NI 公司為 Visual Studio .NET 和 Visual Studio 6. 0 環(huán)境編制的一個集成式套件,其中集合了各種常用的測量和自動化控件、工具以及編 程 類 庫。NI Measurement Studio 帶 有 的 ActiveX和 .NET控件、面向?qū)ο蟮臏y量硬件接口、高級分析庫、科學(xué)的用戶界面控件、測量數(shù)據(jù)網(wǎng)絡(luò)化、向?qū)А⒔换ナ酱a設(shè)計器和高擴(kuò)展性類庫等功能,極大地減少了 Windows 應(yīng)用程序的開發(fā)時間.
j9-j11
m_Graph3D. Plot3DCurve (xD,y D,z D); / / 繪制三維圖
圖 7 為五軸聯(lián)動精加工維納斯仿真模型及小葉輪仿真模型。
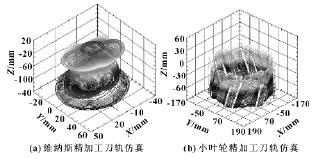
圖 7維納斯與小葉輪模型精加工仿真
3. 4 數(shù)控軟件界面及功能簡介
軟件界面 (圖 8) 分為以下幾個模塊: (1) G 代碼顯示窗口。該區(qū)域顯示待加工的 G 代碼文本。(2)加工刀位點顯示區(qū)。該區(qū)域顯示當(dāng)前加工刀位點在編程坐標(biāo)系下的坐標(biāo)值。 (3) 加工刀軌仿真窗口。應(yīng)用 Lab VIEW 控件 Measurement studio,顯示加工刀軌的 3D 仿真圖,同時具有用戶拖拽及縮放命令功能。(4) 手動調(diào)試按鈕。能夠?qū)崿F(xiàn)單軸獨立運動。 (5)加工刀具顯示區(qū)。該區(qū)域顯示當(dāng)前次加工刀具信息。(6) 加工操作區(qū)域。該區(qū)域為此軟件的主要操作區(qū)域,其中包括建立 Access 數(shù)據(jù)表、查看加工數(shù)據(jù)表和開始本次加工等功能。 (7) 五軸各模式選擇。此數(shù)控軟件能兼容控制五軸其他模式,針對不同模式能調(diào)用對應(yīng)軌跡規(guī)劃算法。 (8) 加工進(jìn)度顯示。開辟獨立線程,對加工過程進(jìn)行計時。
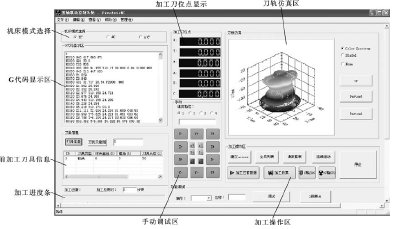
圖 8 數(shù)控軟件界面及功能簡介
4 、加工驗證
數(shù)控軟件通過對 UG NX 后處理構(gòu)造器產(chǎn)生的斷臂維納斯 G 代碼進(jìn)行解析,對石蠟試件進(jìn)行了實際雕刻 (如圖 9 所示),無過切與撞刀,雕刻過程穩(wěn)定性良好。最終加工試件誤差在±0. 04 mm,達(dá)到設(shè)計要求。

圖 9 維納斯模型加工
5、 結(jié)束語
介紹了基于運動控制器的經(jīng)濟(jì)型五軸聯(lián)動 BC 型木工雕刻機(jī)床機(jī)械結(jié)構(gòu)的設(shè)計與數(shù)控系統(tǒng)的研究。根據(jù)雕刻工件的特點,完成了 BC 型木工雕刻機(jī)的運動學(xué)模型分析,并搭建了基于 PC+NC 模式的數(shù)控系統(tǒng)硬件,運用 VC++6. 0 對數(shù)控系統(tǒng)軟件進(jìn)行了編制。通過對維納斯 UG 模型尺寸與實際加工模型的測量尺寸進(jìn)行比對,對雕刻機(jī)床加工精度進(jìn)行了驗證,精度符合設(shè)計要求。
投稿箱:
如果您有機(jī)床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進(jìn)行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機(jī)床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進(jìn)行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
更多相關(guān)信息

業(yè)界視點
| 更多
查")
行業(yè)數(shù)據(jù)
| 更多
- 2025年6月 新能源汽車銷量情況
- 2025年6月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2025年6月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2025年6月 軸承出口情況
- 2025年6月 分地區(qū)金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2025年6月 金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2025年5月 新能源汽車銷量情況
- 2025年5月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2025年5月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2025年5月 軸承出口情況
- 2025年5月 分地區(qū)金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2025年5月 金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2025年4月 新能源汽車銷量情況
博文選萃
| 更多
- 機(jī)械加工過程圖示
- 判斷一臺加工中心精度的幾種辦法
- 中走絲線切割機(jī)床的發(fā)展趨勢
- 國產(chǎn)數(shù)控系統(tǒng)和數(shù)控機(jī)床何去何從?
- 中國的技術(shù)工人都去哪里了?
- 機(jī)械老板做了十多年,為何還是小作坊?
- 機(jī)械行業(yè)最新自殺性營銷,害人害己!不倒閉才
- 制造業(yè)大逃亡
- 智能時代,少談點智造,多談點制造
- 現(xiàn)實面前,國人沉默。制造業(yè)的騰飛,要從機(jī)床
- 一文搞懂?dāng)?shù)控車床加工刀具補(bǔ)償功能
- 車床鉆孔攻螺紋加工方法及工裝設(shè)計
- 傳統(tǒng)鉆削與螺旋銑孔加工工藝的區(qū)別