



船用柴油機電控系統關鍵技術
2015-9-6 來源:數控機床市場網 作者:樊明龍 沈玉華
摘要: 針對船用柴油機電控系統對柴油機的調速問題,根據國內外非線性自調整算法的研究以及船用柴油機調速器的設計原理,在傳統 PID 控制的基礎上,本文提出非參數模型的自調整控制策略。通過對 D6135 型船用柴油機特點和性能分析,對其進行仿真建模,最后在 Matlab 軟件中對柴油機調速控制系統進行仿真,對電控系統的關鍵技術進行研究。根據仿真結果可以看出本文提出的自整定控制策略具有可行性,為船用柴油機電控系統提供一個有效的控制算法。
關鍵詞: 柴油機;控制;自整定
0 引言
在現代船用柴油機的控制系統中普遍采用電控系統,通過電控系統實現對柴油機轉速的穩定控制,使其在工況范圍內保證轉速波動率、恢復時間、調速率等運行參數在規定的范圍中。而通過對船用柴油機的系統運行機理進行分析,可以發現被控對象數學模型復雜,難以精確描述,具有很強的非線性特性和時滯性。并且柴油機在運行過程中還受冷卻水溫度、燃油溫度、負載等外界條件影響,具有很明顯的時變特性。傳統控制方法已經難以滿足對柴油機的控制要求,因此需要利用現代控制算法來解決柴油機的控制問題,使其能夠運行在穩定的參數范圍內。
1 自整定控制算法
1. 1 系統設計要求
1) 穩定性。穩定性是判斷控制系統性能的最基本要求,其具體要求是,在有外界干擾的情況下,能夠保持系統的狀態能夠穩定在一定范圍內。
2) 收斂性。收斂性是評估一個自適應用控制系統算法優劣的重要參考標準,主要指一個控制系統在保證能夠收斂的條件下,可以完成系統想要達到的不同目標,同時保證變量的范圍有界。
3) 魯棒性。魯棒性是用來表示一個控制系統對參數擾動的不敏感性。指系統在沒有特別的針對動態特性進行建模的情況下,遇到外界擾動時,系統可以保持穩定性和動態性。
1. 2 自整定 PID 算法
在現代控制系統中,一般都采用比較成熟、可靠的數字 PID 控制器,以實現較高的控制精度。PID控制器主要有增量式和位置式 2 種算法。其中位置式 PID 控制算法應用較為廣泛,該算法可以根據采樣時間差來計算控制量,并且 PID 公式中微分和積分項都需要離散化后才能使用,由于這一特性,導致其在運行時計算機的計算量非常繁重,并且當輸出大幅度變化時,輸出對應的執行機構也會大幅度的跳變,很容易發生嚴重的事故,所以不適合實驗或開發應用。
增量式 PID 控制算法則很好地克服了位置式 PID控制算法的缺點。增量式 PID 算法只要輸出控制量的增量,計算量不大,算法的增量控制表達式如下:

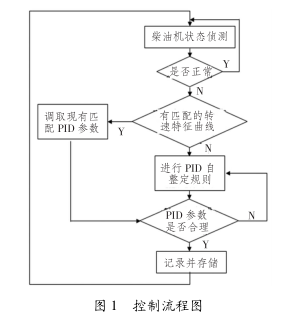
1. 3 在線自整定控制流程
在線自整定控制算法的流程圖如圖 1 所示。從圖中可知,本算法首先對柴油機的轉速進行檢測,然后再根據所測得的轉速在線對 PID 各參數進行判定和整定,在整定完成后,對參數進行記錄儲存。
1. 3. 1 PID 參數自整定過程
參數的自整定過程,首先是對反饋的轉速進行判斷,判斷是否進入自整定過程,然后對參數進行暫時存儲,然后將反饋值與給定值進行比較,然后計算出相應的 Kp和 Ki調節參數,然后實現對方向、幅度等參數的調節。
本算法通過單周期內最小轉速與最大轉速之間的差值對轉速變化的情況來進行判斷,然后根據轉速變化情況來確定增減 Kp和 Ki,從而達到自整定的目的。在確定調節方向后,還要確定調整幅度,若不能調整到與當前轉速相匹配,會導致調整步長過大或過小。過大則突升突降,引起系統不穩定,過小則效果不明顯,難以看到轉速變化幅度。
本算法通過對前后 2 次幅值的差來確定 Kp的具體調整幅度。根據式(2)和式(3),當差值小于給定的閥值時,則增加調整幅度,當差值小于給定的閥值時,則降低調整幅度。依此對參數進行調整。對Ki調整方式與此類似,主要判斷 2 次的差值與閥值的大小,來對調整幅度精細修正。
當系統接近穩定時,可以減小調節,進入微調模式,降低 Kp和 Ki的調整步長,從而實現穩定調節。
1. 3. 2 參數記錄
在對 PID 參數經過一次在線調整后,根據專家自整定的相關方法,把此次調整后的結果進行記錄方便以后直接調用。在系統以后的調整中,當遇到相同的轉速調整要求時,就可以直接調用之前已經調整好的參數,從而降低系統的計算時間和計算量。
1. 3. 3 自整定流程
本算法利用手動調整的經驗來對 PID 參數進行調整。首先在進入調整模式后,先把 Ki參數定位為 0,優先調整 Kp,使轉速動態穩定,穩定之后調整 Ki, 控制動態誤差。在調整 Kp和Ki時,都要遵循先確定調整方向,然后確定調整幅度,在快要接近調整目標后,在對參數進行微調,從而快速調整系統達到穩定。
2 柴油機數學模型的建立
以 D6135 型號的船用柴油機為對象,對電控系統的關鍵技術展開研究。重要的是需要建立系統模型,由于整個柴油機系統組成復雜,有必要對其工作過程和硬件結構進行簡化處理,將系統一些主要的輸出狀態變量的變化過程表示出來。
2. 1 壓氣機模型
氣壓計模型中,增壓機轉速與流量、出口的壓力溫度和氣壓機消耗的轉矩均為輸入參數,通過查表數據得出下列關系式:

2. 2 中冷器模型
在中冷器模型中,以氣壓計出來的氣體溫度、壓力質量和流量作為輸入參數,以出口氣體壓力作為輸出參數,且工作效率為 ε= 0. 84, 從而得到出口溫度的計算公式:
其中 Tω為進口溫度;壓力損失的計算公式為:
其中: Δp0為中冷器的壓力損失; qm0為中冷器的流量。
2. 3 柴油機本體模型
1) 氣缸充氣效率 ηv的計算公式為:
其中: η0為最大充氣效率; n0為充電效率為 η0時對應的轉速。
2) 發動機流量 qm3模型氣缸內氣體流量的公式為:
其中: qmf為單位時間噴入的燃油質量; HLHV為燃油熱量指數; QW為冷卻物帶走的熱量; Pc為單位時間內輸出的有用功; cpa和 cpe為進氣與排氣工質的比熱容。
4) 柴油機動力學模型
為了計算方便,將船用柴油機動力模型等效為一個由負載和無慣性連軸組成的系統,由牛頓第二定律,可以得到方程:
2. 4 渦輪模型
根據渦輪轉速與質量流量之間的關系,可以得到渦輪的膨脹比和效率,然后得到出口溫度計算公式和發出轉矩計算公式為

2. 5 增壓器動力學模型
壓氣機的增壓器轉子平衡方程為:

2. 6 執行機構建模
執行器建模的方式一般有 2 種: 一是理論法,根據電磁學和動力學通過數學推導進行建模; 二是試驗法,根據實際實驗測得的階躍響應進行建模。在這里采用第 2 種方式。
執行機構的階躍響應的一階慣性環節模型的傳遞函數為:

3 Simulink 建模及仿真
首先對柴油機模型進行仿真參數設定,通過幾次試仿真實驗,發現0.001 的步長足以覆蓋到柴油機運行過程中所有的波動情況。所以仿真步長設定為0.001 s,仿真時間設定為10 s,就可以完整展現整個仿真過程。而在仿真算法中,選擇固定步長的 Ode5 算法,此算法與變步長經典算法 Ode45 類似,只需要前面一個時間點的解,就可以將當前點的解計算出來。
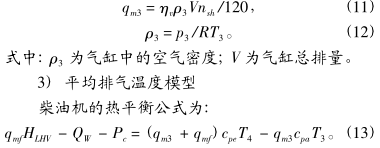
首先在不加自整定系統情況下,先對傳統 PID參數進行整定,經過調試,設定 Ki= 5,Kd= 0. 5,然后調整 Kp, 其余參數不變,得到轉速變化曲線如圖 2 所示。
從圖2 可看出,由于 Kp從5 增大到10,導致轉速變化曲線周期和幅值都出現了明顯的變化,速度曲線甚至出現了大幅度的抖動,因此可以確定 Kp的值需要保持在10 以內。在整定 Kp時,讓調整步長在 0.01 ~0.04 之間,可以防止速度曲線出現大幅震蕩。
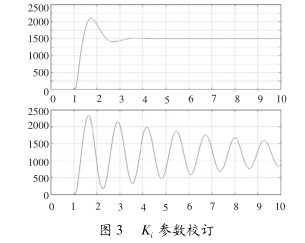
接著整定 Ki, 設定 Kp= 2.5, Kd= 0.5, 速度變化曲線如圖3 所示。根據圖3,當 Ki參數為15 時,轉速的變化曲線幾乎一直在振蕩,難以穩定下來,且震動幅值變大,在實驗操作中需要盡可能避免這種情況發生,所以,在調整Ki步長參數時,每次調整保證在0.1~0.2 之間,從而降低曲線振蕩發生的可能。
最后把 PID 自整定模塊添加到柴油機的控制系統上,得到速度曲線如圖 4 所示。

由圖4 可看出,柴油機轉速曲線在開始時震動明顯,但隨著時間的推移, Kp和 Ki參數不斷自動整定,震動幅度明顯降低,最終達到穩定,證明這種在線自整定策略在柴油機控制系統上具有一定可行性。
4 結語
本文在對傳統的 PID 控制器的基礎上,結合非線性自整定控制器的設計思想,根據船用柴油機調速原理,對非參數模型的在線自整定算法進行初步設計。并以 D6135 型柴油機為模型,根據其特點和性能,進行系統建模,完成了船用柴油機控制系統的仿真實驗,由仿真結果可以看出本文提出的自整定控制策略具有一定的可行性,為柴油機電控系統的控制策略提供了一個有效的方法。
投稿箱:
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息

