



激光干涉儀在數(shù)控機(jī)床調(diào)試驗(yàn)收中的應(yīng)用
2021-6-9 來源:中國(guó)航發(fā)貴州黎陽航空動(dòng)力有限公司運(yùn)行保障 作者: 張淑芳,秦云
摘要:介紹 Renishaw XL-80 型激光干涉儀的基本構(gòu)成和工作原理,通過對(duì)新引進(jìn)設(shè)備 ELB SMART BL10 數(shù)控緩磨的位置精度的測(cè)量驗(yàn)收、檢測(cè)結(jié)果評(píng)定以及螺距誤差補(bǔ)償,掌握激光干涉儀在測(cè)量數(shù)控機(jī)床位置精度上的使用技巧,修正機(jī)床因運(yùn)輸振動(dòng)或環(huán)境溫度差異造成的位置誤差,最終達(dá)到機(jī)床位置精度驗(yàn)收標(biāo)準(zhǔn),保證數(shù)控機(jī)床的加工精度。
關(guān)鍵詞:激光干涉儀;位置精度;螺距誤差補(bǔ)償
0 引言
新機(jī)床到廠安裝后,因運(yùn)輸過程中的顛簸及環(huán)境溫度差異等原因,會(huì)造成機(jī)床位置精度變化,產(chǎn)生新的定位誤差。因此新機(jī)床經(jīng)安裝調(diào)試后須使用激光干涉儀對(duì)其位置精度進(jìn)行檢測(cè)評(píng)定,必要時(shí)進(jìn)行螺距誤差補(bǔ)償,以修正誤差值,達(dá)到機(jī)床驗(yàn)收標(biāo)準(zhǔn),保證機(jī)床加工精度要求。
1 、激光干涉儀的組成及基本原理
Renishaw XL-80 激光干涉儀所用激光的波長(zhǎng)為 633 nm,且其長(zhǎng)期波長(zhǎng)穩(wěn)定性(在真空中)高于 0.05 ppm,是可對(duì)數(shù)控備(加工中心、三座標(biāo)測(cè)量機(jī)等)的位置精度(定位精度、重復(fù)定位精度等)、幾何精度(俯仰扭擺角度、直線度、垂直度等)進(jìn)行精密測(cè)量的儀器。
Renishaw XL-80 激光干涉儀基本系統(tǒng)包括:XL80 激光頭(帶三角架)及相應(yīng)的光學(xué)器件。其中用于線性測(cè)量的組件包括一只分光鏡、兩只反光鏡和兩只用于光學(xué)準(zhǔn)直的光靶,線性測(cè)量工作原理如圖 1 所示。激光頭發(fā)出激光束 1 經(jīng)分光鏡分成兩束光,激光束 2 經(jīng)固定反光鏡反射,形成參考光束,激光束 3 經(jīng)移動(dòng)反光鏡反射,形成測(cè)量光束,兩束光匯聚于分光鏡中相疊加彼此干涉,相位相反時(shí)形成相消干涉,產(chǎn)生暗條紋;相位相同時(shí)形成相長(zhǎng)干涉,產(chǎn)生明條紋。如果測(cè)量光路長(zhǎng)度改變,干涉光束的相對(duì)相位將改變,反光鏡每移動(dòng) 316.4 nm 就會(huì)出現(xiàn)一個(gè)明—暗—明的光強(qiáng)變化循環(huán),激光干涉儀通過接收到明暗條紋變化,經(jīng)過電子細(xì)分,從而知道距離的細(xì)微和準(zhǔn)確的變化,以此來測(cè)量移動(dòng)距離。
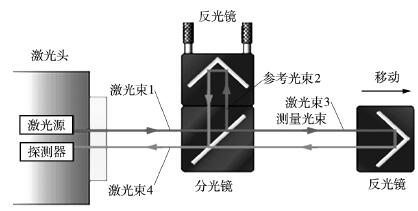
圖 1 線性測(cè)量工作原理
2、位置精度的測(cè)量
以 2019 年 8 月份新進(jìn)設(shè)備 ELB SMART BL10 數(shù)控緩磨為例,其控制系統(tǒng)為 SIEMENS 840DSL,被測(cè)軸以 X 軸為例,檢測(cè)目的是驗(yàn)收檢測(cè),檢測(cè)項(xiàng)目為位置精度檢測(cè)。
(1)機(jī)床開機(jī)回零后,運(yùn)行熱機(jī)程序預(yù)熱 15 min。
(2)將激光干涉儀按布置連線圖進(jìn)行安裝連接,開啟 XL-80激光電源,預(yù)熱約 5 min。
(3)使用光靶快速準(zhǔn)直光束。①沿運(yùn)動(dòng)軸方向?qū)⒐ぷ髋_(tái)推離激光頭,直到光束開始移開光靶。當(dāng)只有一半的光束擊中白點(diǎn)時(shí)停止移動(dòng)機(jī)床;②使用三角架后方的左、右(上、下)扭擺調(diào)節(jié)小旋鈕,調(diào)整激光頭的角度偏轉(zhuǎn),使光束移動(dòng)到以光靶白點(diǎn)中心對(duì)稱的位置。使用三角架左右平移(垂直升降)大旋鈕,調(diào)整激光頭,使光束返回光靶白點(diǎn)中心;③沿著運(yùn)動(dòng)軸方向繼續(xù)推離工作臺(tái)。當(dāng)看到激光光束移開目標(biāo)位置時(shí)再次停止。重復(fù)②光束準(zhǔn)直調(diào)整步驟,直到到達(dá)軸末端。到達(dá)末端后,將工作臺(tái)移回近激光器、軸起點(diǎn)位置。若光束不在光靶白點(diǎn)中心,則水平平移(垂直升降)激光器或通過移動(dòng)直線軸,使光束回到光靶中心位置;④重復(fù)步驟①至③操作,直到光束在整個(gè)運(yùn)動(dòng)軸范圍內(nèi)都能保持在光靶中心。
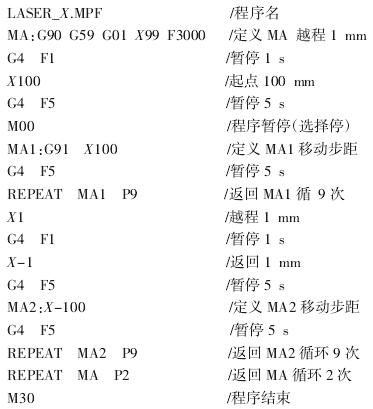
(4) 編制測(cè)量運(yùn)行程序。設(shè)置機(jī)床工件坐標(biāo)系 G59:X0Y0 Z0,使之與機(jī)床機(jī)械坐標(biāo)系一致;依據(jù)機(jī)床 X 軸實(shí)際測(cè)量參數(shù),編輯測(cè)量程序 LASER_X.MPF 如下:
(5)設(shè)置激光干涉儀線性測(cè)長(zhǎng)軟件。進(jìn)入測(cè)量向?qū)В来瓮瓿赡繕?biāo)設(shè)定、采集數(shù)據(jù)啟動(dòng)、標(biāo)題信息、自動(dòng)采集數(shù)據(jù)設(shè)定 4 個(gè)窗口的設(shè)置。其中在自動(dòng)采集數(shù)據(jù)設(shè)定中的公差窗口及越程量大小設(shè)置,依據(jù)以往經(jīng)驗(yàn),最好設(shè)定為機(jī)床實(shí)際越程的 1/2,即公差窗口:0.5 mm,越程量大小:0.5 mm。如兩參數(shù)大于等于實(shí)際越程值,可能造成軟件采集錯(cuò)誤數(shù)據(jù)或無法采集。
完成上述設(shè)置后,進(jìn)入測(cè)量界面,先試運(yùn)行機(jī)床,判斷數(shù)據(jù)方向,由于起點(diǎn)不為零,需先使用將數(shù)據(jù)手動(dòng)定義到起點(diǎn) 100,啟動(dòng)機(jī)床檢測(cè)程序,進(jìn)行自動(dòng)采集數(shù)據(jù)。
3 、機(jī)床位置精度的評(píng)定
數(shù)據(jù)采集結(jié)束后,保存測(cè)量數(shù)據(jù),按廠家出廠檢測(cè)標(biāo)準(zhǔn)(VDI3441 標(biāo)準(zhǔn))進(jìn)行數(shù)據(jù)分析。分析結(jié)果見圖 2,依照公司與機(jī)床廠家簽訂的驗(yàn)收標(biāo)準(zhǔn)要求,VDI3441 機(jī)床檢驗(yàn)標(biāo)準(zhǔn):定位精度:0.004 mm;重復(fù)定位精度:0.002 mm。初次測(cè)試結(jié)果為:定位
精度 0.0685 mm,不符合驗(yàn)收標(biāo)準(zhǔn)。
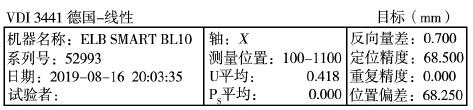
圖 2 X 軸位置精度檢測(cè)結(jié)果(程序循環(huán) 1 次的測(cè)量結(jié)果)
4、螺距誤差補(bǔ)償
查看機(jī)床 X 軸參數(shù) MD32700(1)=1 可知,該設(shè)備 X 軸位置精度補(bǔ)償方式為螺距誤差補(bǔ)償,補(bǔ)償文件為 AX1_EEC.INI。
使用激光干涉儀數(shù)據(jù)分析軟件分析數(shù)據(jù),點(diǎn)擊[1 分析數(shù)據(jù)]→[誤差補(bǔ)償圖表],打開“誤差補(bǔ)償表格”窗口,設(shè)置圖表類型:均值補(bǔ)償、補(bǔ)償類型:絕對(duì)值、正負(fù)符號(hào)轉(zhuǎn)換(+/-):誤差值補(bǔ)償間隔:25 mm(AX1_EEC.INI 文件中數(shù)據(jù)),點(diǎn)擊[繪制誤差補(bǔ)償圖表]生成補(bǔ)償數(shù)據(jù)。
點(diǎn)擊機(jī)床上 [MENU SELECT]→[調(diào)試]→[系統(tǒng)數(shù)據(jù)],拷貝 NC 數(shù)據(jù)中的軸 1 的測(cè)量系統(tǒng)錯(cuò)誤補(bǔ)償文件到 U 盤,可得補(bǔ)償文件 AX1_EEC.INI;依據(jù)生成的補(bǔ)償數(shù)據(jù),在計(jì)算機(jī)上修改補(bǔ)償文件 AX1_EEC.INI;修改機(jī)床 X 軸參數(shù) MD32700(1)=0;激活修改后的補(bǔ)償文件;改回 MD32700(1)=1;激活參數(shù)設(shè)置,補(bǔ)償數(shù)據(jù)生效;修改機(jī)床 X 軸參數(shù) MD32450(反向間隙)的值,即改為原值與補(bǔ)償數(shù)據(jù)中的反向間隙值的和。完成數(shù)據(jù)補(bǔ)償后,再次啟動(dòng)激光線性測(cè)長(zhǎng)軟件,采集、分析數(shù)據(jù),其結(jié)果如圖 3 所示。
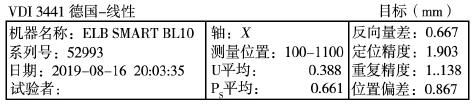
圖 3 補(bǔ)償后 X 軸位置精度測(cè)量結(jié)果
檢測(cè)結(jié)果為定位精 度 :0.0019 mm 且重復(fù)定位精度 :0.0014 mm。 符合公司與機(jī)床廠家簽訂的驗(yàn)收標(biāo)準(zhǔn) 要求 。DI3441 機(jī)床檢驗(yàn)標(biāo)準(zhǔn)為定位精度:0.004 mm 且重復(fù)定位精度:0.002 mm。
5、結(jié)束語
激光干涉儀是機(jī)床入廠最終位置精度檢測(cè)的重要工具,可以通過它對(duì)機(jī)床位置精度進(jìn)行測(cè)量、評(píng)定及螺距誤差補(bǔ)償,使機(jī)床達(dá)到驗(yàn)收要求標(biāo)準(zhǔn),保證設(shè)備加工精度。此外,通過它還可以用于了解使用過程中的設(shè)備的位置精度情況,了解誤差產(chǎn)生的原因,修正精度誤差。激光干涉儀作為機(jī)床調(diào)試驗(yàn)收中的必備手段,將一直服務(wù)于設(shè)備檢測(cè)及修理行業(yè)。
投稿箱:
如果您有機(jī)床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進(jìn)行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機(jī)床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進(jìn)行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
更多相關(guān)信息

業(yè)界視點(diǎn)
| 更多
查")
行業(yè)數(shù)據(jù)
| 更多
- 2025年6月 新能源汽車銷量情況
- 2025年6月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2025年6月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2025年6月 軸承出口情況
- 2025年6月 分地區(qū)金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2025年6月 金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2025年5月 新能源汽車銷量情況
- 2025年5月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2025年5月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2025年5月 軸承出口情況
- 2025年5月 分地區(qū)金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2025年5月 金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2025年4月 新能源汽車銷量情況
博文選萃
| 更多
- 機(jī)械加工過程圖示
- 判斷一臺(tái)加工中心精度的幾種辦法
- 中走絲線切割機(jī)床的發(fā)展趨勢(shì)
- 國(guó)產(chǎn)數(shù)控系統(tǒng)和數(shù)控機(jī)床何去何從?
- 中國(guó)的技術(shù)工人都去哪里了?
- 機(jī)械老板做了十多年,為何還是小作坊?
- 機(jī)械行業(yè)最新自殺性營(yíng)銷,害人害己!不倒閉才
- 制造業(yè)大逃亡
- 智能時(shí)代,少談點(diǎn)智造,多談點(diǎn)制造
- 現(xiàn)實(shí)面前,國(guó)人沉默。制造業(yè)的騰飛,要從機(jī)床
- 一文搞懂?dāng)?shù)控車床加工刀具補(bǔ)償功能
- 車床鉆孔攻螺紋加工方法及工裝設(shè)計(jì)
- 傳統(tǒng)鉆削與螺旋銑孔加工工藝的區(qū)別